中文摘要:
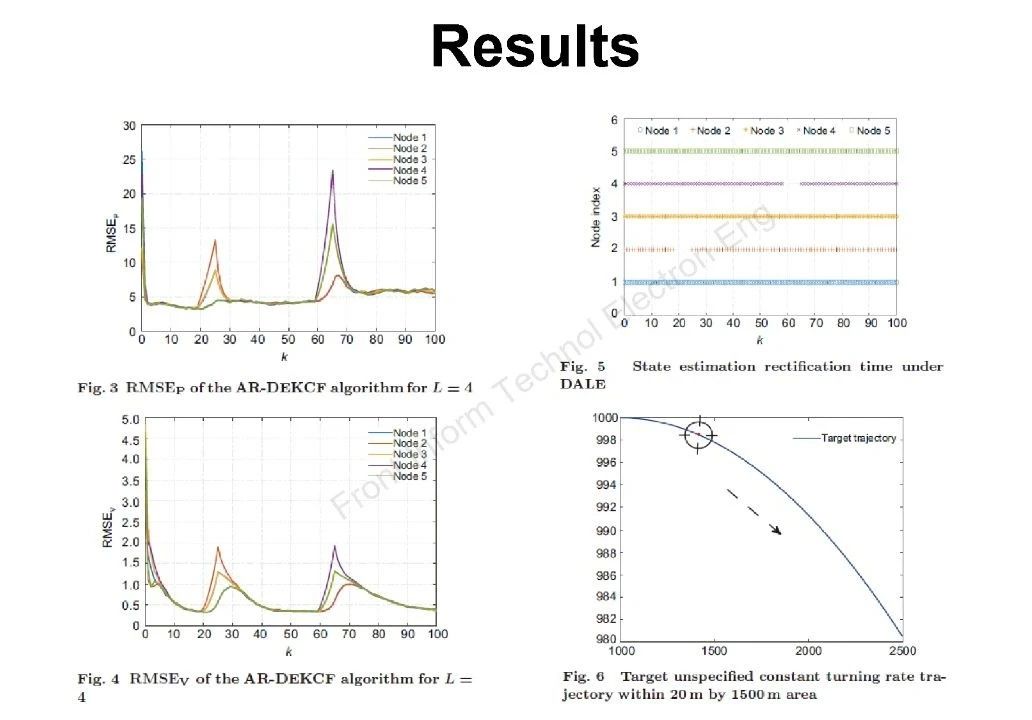
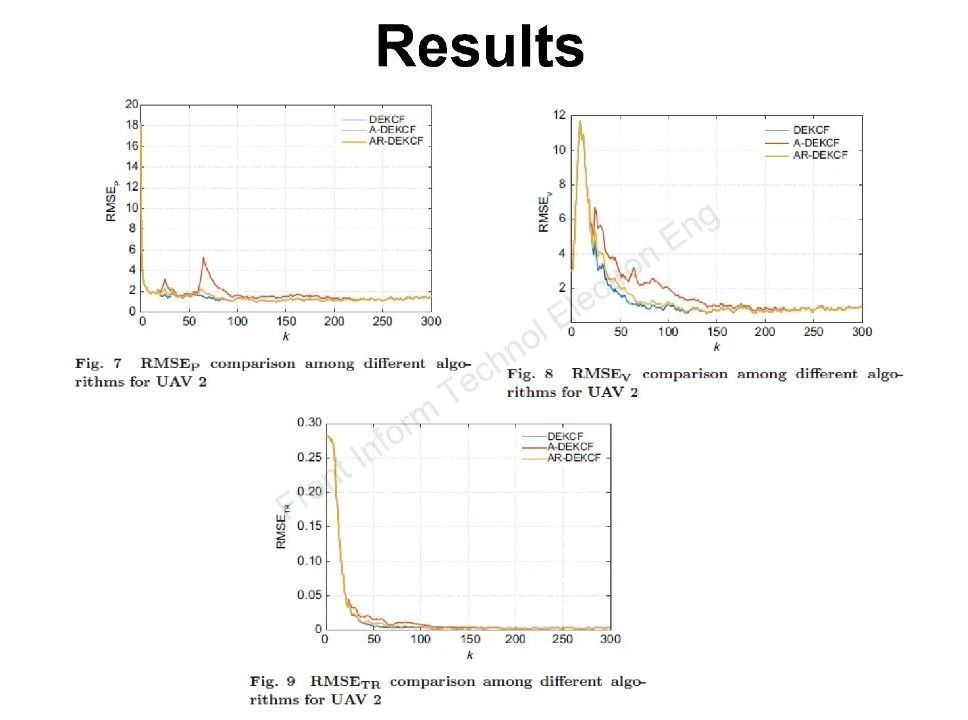
本文研究了非线性系统下多传感器融合过程中发生的欺骗攻击事件。首先,在分布式一致性扩展卡尔曼滤波(DEKCF)框架下引入一种能量受限的欺骗攻击(DALE)。然后,建立一种基于假设检验的检测机制,在存在误差项的情况下,对非线性系统进行线性化处理以检测DALE产生的异常数据。为有效缓解DALE对局部节点预测值的不良影响,分析设计了一种状态估计校正策略,用于重新校准由DALE引起的异常数据。在此基础上,提出一种对攻击具有韧性的分布式一致性扩展卡尔曼滤波(AR-DEKCF)算法,并在适当条件下证明其融合估计误差满足均方指数有界性能。最后,通过多无人机追踪问题的仿真实验验证了该算法的有效性。
关键词:
一致性扩展卡尔曼滤波;假设检验;纠正策略;多无人机追踪
作者:
胡玉如,李忘言,吴励锋,宇振盛
单位:
上海理工大学理学院,中国上海市,200093
本文引用格式:
Yuru HU, Wangyan LI, Lifeng WU, Zhensheng YU, 2024. An attack-resilient distributed extended Kalman consensus filtering algorithm with applications to multi-UAV tracking problems. Frontiers of Information Technology & Electronic Engineering, 25(8):1110-1122.
论文链接:https://doi.org/10.1631/FITEE.2300621