

最近的分析师报告显示,ADAS系统和信息娱乐系统的处理能力预计将在未来五年内大幅提升。他们看到了多个前沿方面的进步,不仅在人工智能 (AI) 方面,在通用计算方面也有突破,还有原始设备制造商 (OEM) 在电子内容构建方式上的变化,即从基于边缘管理,转变到区域管理,再到中央管理。
任何希望乘势而上的系统制造商都需要考虑一个关键问题:如何通过统一的产品系列来满足多种汽车架构需求?
ADAS 系统的市场机遇
据Yole Development报告,通过安全能力和数字驾驶舱方面的直接创新,以及相邻技术的发展和诸如推动驾驶员和乘员监测系统的法规进步,在未来五年增长将高达3倍。
但问题是,这种增长将发生在哪里——边缘传感器、区域中央处理,还是汽车中央处理?与发展缓慢的集中式系统相比,在边缘设备方面,新进入者推出具有竞争力的解决方案,创新势头仍然强劲。相反,成本、安全和集中软件控制则继续推动向集中化发展。
从边缘处理到中央处理
在ADAS系统出现之前,汽车电子产品的快速增长促使汽车OEM重新思考他们希望如何分布这些电子产品。现在,边缘感知加速了这一需求的到来。部分问题在于数据通信的成本和管理,而智能感知进一步加剧了这一问题——繁重的线束连接需要耗费大量功率才能将数据从边缘传输到统一的处理终端。
但是,传感器融合必须融合来自多个传感器视角和类型的数据,通常不能很好地适应边缘或中央处理。我们需要边缘AI来实现快速识别和减少数据量,但通信和融合的需求现在将一些AI需求部署到区域处理器。
与此同时,随着我们向具有一定无人驾驶能力的智能汽车发展,这些智能汽车必须将分布式输入整合到一个驾驶策略管理器下。这种类型的AI不能是分布式的,为了安全和整合考虑,它必须由中央控制器处理。
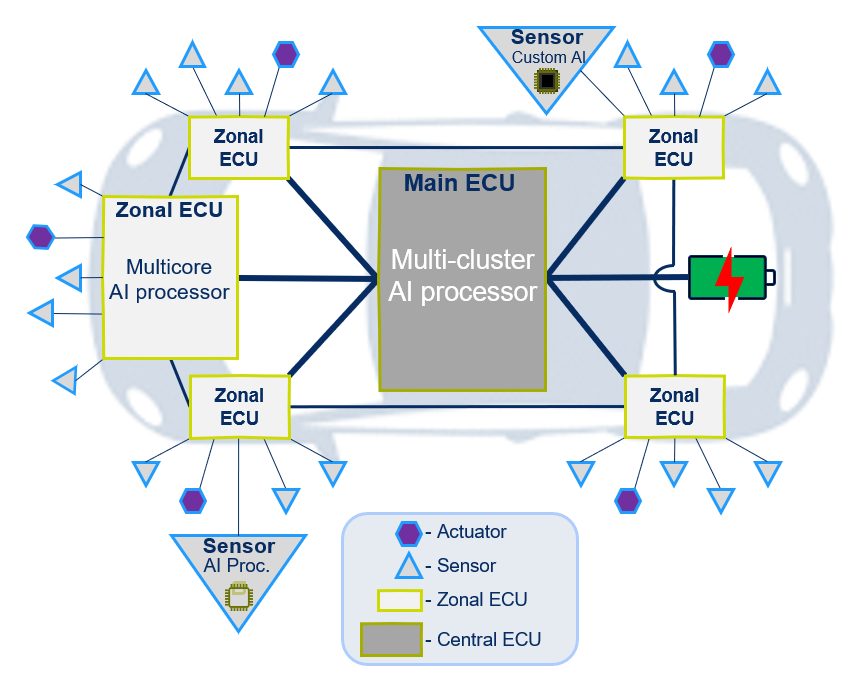
显然,需要三种不同类型的ADAS系统处理能力——边缘、区域和中央,具有三种不同的配置。边缘AI必须保持快速和低成本的优势(因为汽车周边会有许多这样的设备),单个处理器提供高达5 TOPS的算力。区域处理器,整合来自多个边缘设备的输入,必须提供更高级别的并行性和性能,这需要依靠算力高达20 TOPS并且更为昂贵的多核实现。最后,中央驾驶策略引擎必须根据经场景训练的行为进行推理,可能还需要支持某种程度的即时训练。这款引擎很可能是一款造价较高的多芯粒设备,每个芯粒都是多核,提供200 TOPS或更高的算力。
可扩展性对 ADAS 系统意味着什么?
目前,在数量众多的低成本边缘设备、数量较少但成本较高的区域设备以及每辆车可能仅一台的昂贵中央设备之间,营收机会将如何分配还是一个未知数。聪明的人似乎都在为每个细分市场的重要商机做准备。鉴于此,片上系统 (SoC) 产品开发商应该如何构建解决方案?
在部署ADAS系统时,培训、优化和基础设施软件是最大的投资部分。因此,在整个产品系列中用统一的方式支持这几项要素,这对取得经济成功至关重要。边缘解决方案可能比区域或中央解决方案更适合以轻量为目标,但它同样应该允许支持核心功能的缩减版本。这样,就可以使用不同的编译器选项编译经训练的公共网络,并将其映射到边缘、区域和中央解决方案。
相应地,AI硬件平台应支持向上/向下扩展。同一架构,可部署为单个神经引擎或多个并行引擎,具有统一的数据流量控制和内存层次优化。甚至在需要时允许向外扩展到多芯粒实施。
但这里有一个问题:仅仅因为解决方案必须可扩展,网络开发人员就要放弃他们所知道的任何可以提高性能和降低功耗的优化吗?他们应该能够使用所有最先进的 AI 方法来达到其目标。比如采用Winograd转换,以更低的功耗提供2倍的性能,大幅减少带宽,但精度几乎不会降低。这些是高级推理中常用的选项。
或者例如在全混合精度神经MAC阵列中提供的各种激活和权重数据类型,改变层精度可显著降低内存要求和功耗。稀疏引擎更进一步,不再需要乘以零值,在低精度层中将变得更加常见。这不仅提高了性能,还降低了功耗。
在最先进的加速器中,自定义操作必不可少,在推理中添加这些操作的一种方法是借助外部加速器。另一种方法是在可编程的矢量处理单元中具备与原始的硬件引擎相同级别的计算能力。
下一代网络架构可以利用更多功能,如全连接层、RNN、转换器、3D 卷积和矩阵分解。






